0 引言
隨著時代科技的不斷發展,人工智能已逐步取代人工,走進人們的生活與工作中。智能識別已不再陌生,在我國,以往現金支付的傳統消費方式已逐步被手機支付所取代,只需打開手機掃一下二維碼即可輕松支付。而對于汽車制造業來說也是如此,不同的車型不同的結構,不再需要通過人工來識別從而進行工作,工業機器人的普及取代了人工的繁雜沉重的工作,機器人的智能視覺系統則相當于機器人的眼睛,來規范機器人的動作,因而對于機器人視覺系統的應用普及已廣泛被汽車制造業所重視。
上汽大通汽車有限公司無錫分公司涂裝車間2016年UBC底板膠自動段投入使用,成功地引進了發那科機器人iRvision視覺系統,用于補償機器人的軌跡偏差,偏差值定位精準,確保機器人高品質完成噴膠作業,系統運行平穩,已處于國內外高水準行列。本文將以上汽大通汽車公司底板膠噴涂自動段工位為背景,結合涂裝現場新車型的模型輸入、視覺調試,分析發那科機器人iRvision視覺系統的組成和工作原理。
1 機器人引入視覺系統的目的
UBC底板膠噴涂是車身在涂裝生產線工藝鏈中比較重要的工藝,它直接決定了一個成品車底板的防腐性能,此前UBC工位由操作工使用PVC噴槍進行手工噴涂。伴隨上汽大通引進全新車型平臺,且車型眾多底板愈來愈復雜,手工噴涂已經難以保證節拍和噴涂質量,因而涂裝車間于2016年新車間建立時引入發那科UBC機器人來噴涂底板膠。由于車身上底涂抱具后相對位置不一,而底涂機器人位置固定,需要糾正機器人噴涂軌跡來修正車身不同位置帶來的偏差量。因而需要安裝發那科iRvision視覺系統來充當機器人的眼睛,補償噴涂軌跡偏差。
2 iRvision視覺系統的基本原理
iRvision視覺系統由如下設備組成:相機、鏡頭、相機電纜、照明裝置以及機器人控制裝置。其基本工作原理是由若干臺相機在不同位置抓取工件的不同點位以獲得工件的相對位置從而來修正機器人的路徑偏差。因而iRvision視覺系統*主要的作用就是機器人偏差補正。
利用傳感器補正機器人的方法有兩種:絕對位置補正和相對位置補正。所謂絕對位置補正,就是傳感器識別工件的絕對位置后通知機器人,機器人移動傳感器所通知的位置。而所謂相對位置補正,就是由傳感器識別工件從對機器人的程序進行示教的時刻起偏離多少的偏差量(相對位置)后通知機器人,機器人加入了傳感器所通知的偏差量而移動到程序中所示教的位置。iRvision系統就是用相對位置補正的方式進行補償差量。
工件的偏差量是為進行機器人位置的補正而被使用的,所以將其叫做“補正量”或者“補償數據”。補償數據根據進行機器人的程序示教時工件位置和現在的工件位置而計算出。我們將進行機器人程序示教時的工件位置叫做基準位置,將現在的工件位置叫做實測位置。基準位置與實測位置之差就是補償數據。基準位置在進行機器人程序示教時由iRvision進行測量,并存儲在iRvision的內部。我們將基準為止給iRvision的操作叫做基準位置設定。
三維補正包括兩大類即位置補正和抓取偏差補正。位置補正是用相機觀察放置在工作臺上的工件,測量工件偏離多少而被放置,以能夠對偏離放置的工件正確進行作業的方式補正機器人的動作。而抓取偏差補正則是利用相機觀察在機器人偏離的狀態下抓取的工件,測量偏離多少而抓取。在實際調試中,我們采用位置補正方式,利用相機拍照獲得車身位置的偏差從而進行機器人動作補償。
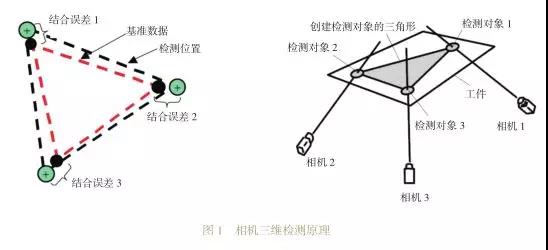
現場采用3臺相機測量車身的3個孔位,計算車身的3維位置進行機器人補正,檢測時,各相機測量自相機向檢測對象的3根視線,將事先已知形狀的三角形應用到此3根視線,確定各檢測對象位于視線上的哪個位置,求出工件的3維位置和姿勢。如圖1所示。
3 iRvision視覺系統的安裝與標定
3.1 iRvision視覺系統的安裝
將四臺CCD相機固定設置在架座上,架座分布在底涂機器人段室體的四個角落,四臺補光燈分別安裝在四臺相機旁邊,相機三用一備,根據車體情況選擇其中三個相機進行拍照測量。當車身到達機器人工位時,相機外殼通過汽缸收縮打開,補光燈打開,相機開始捕捉拍照,相機始終從相同距離觀察相同部位,可以與機器人進行其他作業期間并行地進行視覺的測量,因而具有縮短總體周期時間的優點。相機通過網線連接到底涂機器人控制系統里。當然還有一種固定相機的方式即將其固定于機器人上的手腕部,通過移動機器人利用一臺相機對不同場所進行測量。此方法因未在涂裝生產線上運用就不做過多闡述。
3.2 相機的標定
iRvision利用相機從所拍攝的圖像檢測出對象物進行機器人的補正,需要將iRvision檢測出的圖像上的位置數據變換為符合機器人動作基準的坐標系(用戶坐標系或者工具坐標系)上的位置數據。要進行如此的數據變換,需要有相機觀察哪個機器人的坐標系,如何進行觀察的信息,設定該信息的作業叫做相機的標定。要進行機器人的補正需要先標定相機。
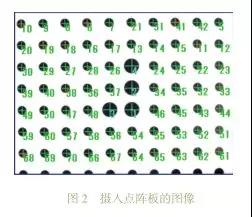
相機采用點陣板標定,首先設定要使用的點陣板夾具的格子間距,選擇1個標定面進行標定。投影方法選擇透視投影,焦點距離設為自動計算,進行點陣板的檢測時自動計算焦點距離。將點陣板固定好后,按下設定按鈕。根據所指定的用戶坐標系的數據,iRvision計算將點陣板夾具放置在用戶坐標系的何處,如何放置,并將結果記錄下來。此時按下F3拍照,攝入點陣板夾具的圖像。按下標定面1的檢測按鈕,用所顯示的紫紅色的長方形窗口指定點的范圍。按下F4確定,當檢測成功時,各個格子的中央會顯示+,如圖2所示,此時4個大格子中顯示有淡藍色的+,小格子中顯示有綠色的+,小格子即使有1~2個無法檢測出也不礙事。至此標定結束。
4 iRvision新程序的建立
4.1 車身的初始化測量
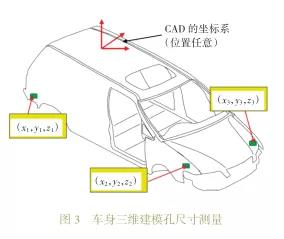
在對新車型進行iRvision示教之前,需要對車身底部進行選孔并標注三個孔彼此的相對位置。在選取定位孔時應盡量選擇易識別的孔位較正的圓孔,所選的孔周圍不能有干擾項,否則拍照時會因識別不了是哪個孔而報錯。選孔只需選擇三個即可,三個孔分布在車底板的三個角落,方便相機識別。在選擇好定位孔后利用CAD等繪圖軟件對三維建模進行測距,得出三個定位孔德相對坐標。如圖3所示。此坐標值用于后面程序的示教。
4.2 視覺系統模型的示教
我們將iRvision的示教數據叫做視覺數據,對iRvision進行示教就是創建視覺數據后進行示教。視覺數據與機器人的程序以及I/O的設定一樣,被存儲在機器人控制裝置內的FROM中。因此能夠存儲視覺數據的容量,隨用戶使用的控制裝置的FROM的可用容量而不同。制定的選項軟件越多,FROM的可用容量就越小。用戶使用的控制裝置的FROM的可用容量可通過示教器的[STATUS]狀態你的[記憶體]進行確認。
模型示教時首先將示教樣車停在底涂機器人自動段,手動打開相機蓋板,打開補光燈,在上位機上進行拍照,觀察所選取的三個孔是否在相機觀察范圍中心。在確定三個孔位置合格后接下來進行孔的示教,分別選擇每個孔,并用卷尺測量出孔與相機的直線位置(不需要非常精準),并輸入在視覺程序里的基準位置上,然后將建模時測出的孔的相對位置輸入在孔德圖形位置里。然后拍照檢出并放大孔的形狀,對孔進行模型示教,設置孔的檢索范圍以及中心原點,并對孔周圍的干擾項進行遮蔽。然后設置孔的角度、大小和扁平率。以上工作結束后對此孔進行對此拍照檢出,觀察檢出得分情況,并此前修改的參數以及對曝光時間進行修改直至檢出合格。在所有工作結束后將此模型保存在iRvision程序里。
5 iRvision視覺系統的其他應用
發那科機器人的iRvision視覺系統除了上述論文講述的用于補償機器人噴涂的偏差之外還有一個重要的功能即車型識別。每當一個車型通過底涂室體機器人噴涂段時,可通過視覺拍照識別車型,從而避免了機器人因噴涂車型錯誤而發生碰撞的風險,此功能多應用于車型眾多且復雜的商用車企業。
6 結語
在如今科技快速發展的時代,人工智能取代人工已是社會主流趨勢,涂裝生產線機器人的開發與運用將逐步解放人工,減少了油漆、防腐膠等物質所形成的有毒環境對工人的影響,而發那科機器人的iRvision視覺拍照技術的引進,則成功地修正了機器人的噴涂軌跡,彌補了由于車身上底涂抱具后相對位置不一以及車身本身所帶來的偏差量。此系統偏差值定位精準,系統運行穩定,能夠幫助機器人高品質完成噴膠作業。與此同時,該視覺系統經過調整改進也可用于其他工控領域。
(參考文獻略,詳情見《現代涂料與涂裝》2019-1)